
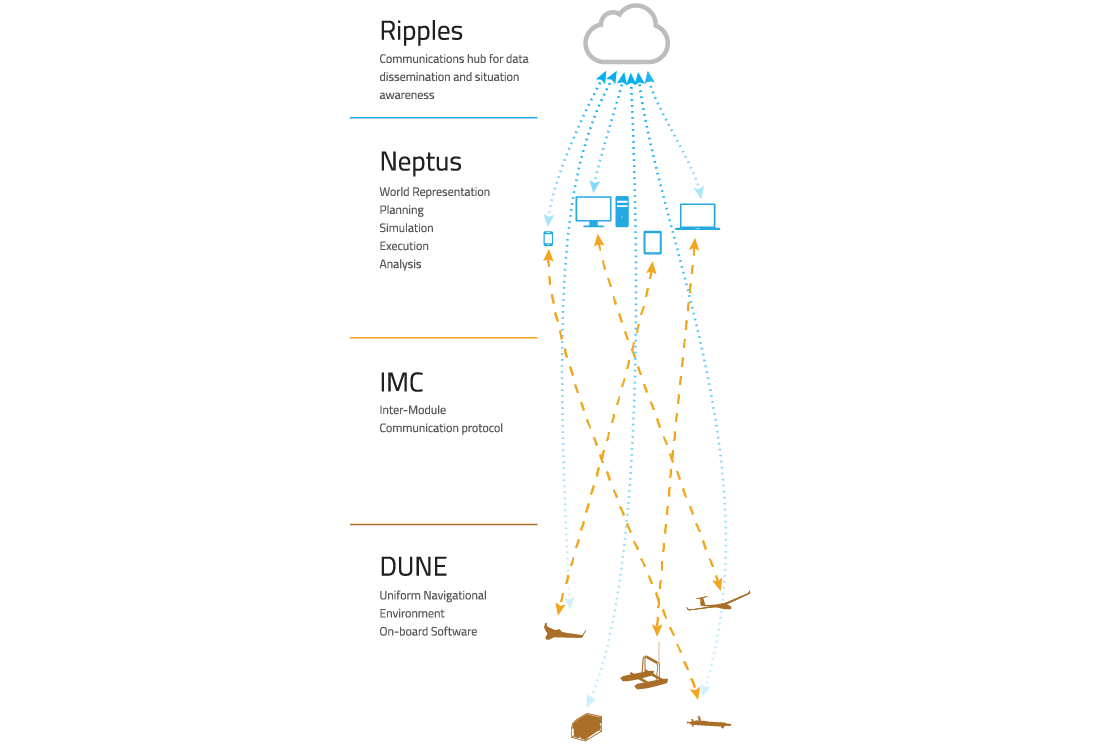
The LSTS Toolchain comprises a set of tools that cover everything related with the operation of autonomous vehicles, from embedded operating systems to command and control interfaces and cloud-based services.
All unmanned vehicles and gateways from LSTS use the GLUED (GNU/Linux Unified Environment Distribution) operating system which is customized individually to the requirements of each platform. On top of GLUED, these embedded systems run DUNE (DUNE Uniform Navigation Environment) which handles logging of sensor data, actuation and navigation. DUNE is compatible with different types of unmanned systems including underwater, surface and aerial.
Also part of the LSTS software toolchain, there's Neptus Command and Control Framework which enables the rapid creation and customization of operator consoles, as well as the revision of gathered data and exporting to other formats.
To synchronize assets distributed on remote locations, the LSTS Toolchain also includes Ripples, a cloud-based infrastructure that receives that aggreagates information from multiple web services and deployed assets which are received over the Internet, GSM and satellite communications.
Finally, all the systems mentioned above rely on the IMC (Inter-Module Communication) protocol for node discovery and exchanging all types of information. There is an added flexibility in using a single communication protocol, this way the control infrastructure can be deployed as a networked vehicle system that can be perceived as a whole integrated system of systems.
by José Pinto